音圈电机位置伺服控制系统的研究与实现
摘要:本文以刘丽丽《音圈电机位置伺服控制系统的研究》及相关电子技术资料为基础,结合电机及其控制系统研发实践,系统阐述了音圈电机(Voice Coil Motor, VCM)高精度位置伺服控制的关键技术、系统构成与实现方案。音圈电机作为一种基于洛伦兹力原理的直接驱动直线电机,具有结构简单、响应快、精度高、无齿槽效应等优点,在精密定位、光学调焦、振动模拟等高精度伺服领域应用广泛。
一、 音圈电机伺服控制系统构成
一个完整的音圈电机位置伺服控制系统通常由以下几个核心部分构成:
- 音圈电机本体:作为执行机构,其性能参数(如力常数、电阻、电感、热参数等)直接影响系统设计。
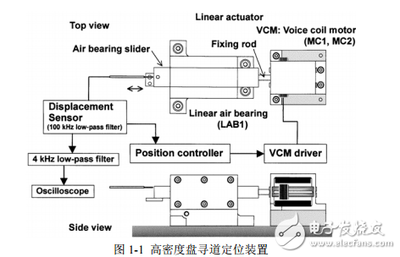
- 位置检测单元:高分辨率的位置传感器(如激光干涉仪、光栅尺、电容传感器等)用于实时反馈电机动子的精确位置,构成闭环控制的基础。
- 功率驱动电路:基于PWM(脉宽调制)技术的H桥或线性功率放大器,负责将控制信号转换为驱动线圈的电流。电子电路图设计需重点考虑电流响应速度、纹波抑制、散热与保护电路。
- 控制器:系统的“大脑”。现代高性能伺服系统多采用数字控制器(如DSP、FPGA或高性能微处理器),实现先进的控制算法。控制律是研究的核心。
二、 控制策略与算法研究
为实现纳米级或微米级的高精度定位,控制算法至关重要。经典的三环控制(位置环、速度环、电流环)是基础框架。
- PID控制及其改进:作为最广泛应用的算法,其参数整定(如Ziegler-Nichols法、试凑法等)是关键。针对音圈电机系统可能存在的非线性、扰动等问题,常采用积分分离、抗积分饱和、模糊PID自适应等改进策略。
- 先进控制算法:
- 前馈控制:基于模型的速度前馈和加速度前馈,可有效补偿跟踪滞后,提高动态响应。
- 鲁棒控制(如H∞控制):在模型不确定性(如参数变化、外力扰动)存在时,保证系统的稳定性和性能。
- 迭代学习控制(ILC):针对重复运行的任务(如扫描运动),通过学习修正控制信号,逐次提高跟踪精度。
- 自抗扰控制(ADRC):将系统内外部扰动视为“总扰动”进行实时估计并补偿,对模型依赖低,鲁棒性强。
三、 系统建模与仿真
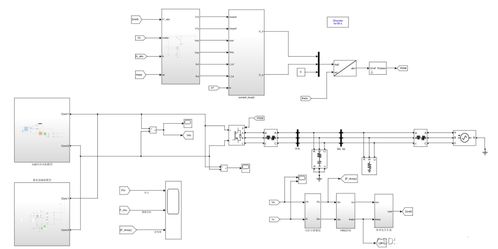
在硬件实现前,利用MATLAB/Simulink、PSpice等工具进行系统建模与仿真是必不可少的研发环节。
- 电机电气与机械模型:建立包含线圈电感、电阻的电气方程,以及与质量、阻尼、弹簧(若有)相关的机械运动方程。
- 控制系统仿真:搭建完整的闭环控制模型,验证不同控制算法的稳定性、动态响应(上升时间、超调量)和稳态精度,并进行频域分析(如伯德图)。
- 功率驱动电路仿真:对H桥PWM驱动电路的开关过程、电流环响应、电磁兼容性(EMC)进行仿真分析,优化电路参数。
四、 硬件实现与实验验证
基于仿真结果进行硬件电路设计与软件编程。
- 电路板设计与制作:绘制包含微处理器最小系统、信号调理电路、功率驱动模块、通信接口等的PCB(印刷电路板)。需特别注意模拟信号(如传感器反馈)与数字信号、大电流功率地的隔离与布局。
- 软件程序开发:在控制器上实现实时控制算法、PWM生成、数据采集与通信等功能。中断服务程序的时序设计至关重要。
- 系统调试与实验:通过阶跃响应、正弦跟踪、定位精度测试等实验,采集实际数据,与仿真结果对比,进一步优化控制参数,直至满足设计指标。
五、 结论与展望
音圈电机位置伺服控制系统是一个涉及电磁学、机械动力学、控制理论、电子电路与嵌入式软件的多学科交叉工程。其研发成功依赖于精确的模型、先进的控制算法和可靠的硬件实现。随着新材料、更高性能处理器(如AI芯片)以及更智能算法(如深度学习与模型预测控制结合)的发展,音圈电机伺服系统将向着更高精度、更快速度、更强适应性的方向发展,在半导体制造、生物医疗、航空航天等尖端领域发挥更大作用。
(注:本文综合了相关文献与工程实践知识,旨在为从事电机及其控制系统研发的工程师和技术人员提供一个系统性的技术参考框架。)
如若转载,请注明出处:http://www.yudiping.com/product/36.html
更新时间:2026-06-19 14:44:27