非汽车领域电气控制系统中的伺服电机与步进电机 选型指南与核心区别
在非汽车领域的工业自动化、机器人、精密仪器、医疗设备及数控机床等电气控制系统中,电机作为核心执行元件,其选型直接决定了系统的精度、响应速度和可靠性。伺服电机和步进电机是两种最常用的运动控制电机,它们各有特点,适用于不同的应用场景。本文旨在为软件开发人员及系统设计者提供一个清晰的选型框架,并深入剖析两者的核心区别。
一、核心区别概述
在选择之前,必须理解两者的根本工作原理和性能差异:
- 控制原理与反馈机制:
- 步进电机:采用开环控制。控制器发送脉冲信号,每一个脉冲对应电机转动一个固定的角度(步距角)。电机的位置由接收到的脉冲总数决定,系统默认电机已按指令执行,没有内置的位置或速度反馈。因此,存在失步(负载转矩过大导致未跟上脉冲)或过冲的风险。
- 伺服电机:采用闭环控制。系统由电机、驱动器、编码器(反馈装置) 构成一个闭环。控制器发送指令后,编码器实时反馈电机的实际位置/速度给驱动器,驱动器比较指令与反馈的差值,进行实时调整以消除误差。因此,控制精度和动态响应性能更高。
- 性能特性对比:
- 转矩特性:步进电机在低速时具有较好的转矩,但随着转速升高,其输出转矩会急剧下降(存在“转矩-速度曲线”)。伺服电机在额定转速内能提供恒定的额定转矩,短时过载能力强。
- 精度与平稳性:步进电机的精度取决于步距角(例如1.8°/步),细分驱动后可提高分辨率,但无法消除固有的低频振动。伺服电机运行极其平滑,即使在低速下也无振动,定位精度由编码器分辨率决定,通常远高于步进电机。
- 响应速度与过载能力:伺服系统响应极快,加速性能优异,能承受数倍的过载。步进电机响应较慢,过载时直接导致失步,必须通过增大电机规格来预留足够的“安全余量”。
- 成本:通常,同功率下,步进电机及其驱动器的系统成本显著低于伺服系统。
二、选型决策指南
选择伺服还是步进,应基于应用的具体需求进行权衡:
优先考虑步进电机的场景:
成本敏感型项目:预算有限,且对动态性能要求不高。
静态负载或低速应用:负载稳定,速度较低(通常低于1000 RPM),且对平稳性要求不苛刻,如3D打印机、低端扫描仪、传送带定点启停。
开环控制可接受的场合:系统结构简单,允许一定的失步风险或可通过机械限位等方式进行原点校准。
对保持转矩有要求:步进电机在通电静止时能提供稳定的保持转矩,无需额外刹车即可锁定位置。
优先考虑伺服电机的场景:
高精度、高动态响应要求:需要快速启停、高速运行、精确同步(如多轴联动)的场合,如工业机器人、贴片机、高端数控机床。
负载变化剧烈或不确定:负载在运行过程中可能发生较大变化,需要电机实时调整输出转矩以防止失速,如缠绕设备、张力控制。
高速应用:需要在中高速(通常超过1000 RPM)下仍保持稳定转矩和精度。
系统可靠性要求极高:不允许出现失步或位置丢失,闭环反馈能确保指令被准确执行并监控状态。
三、对软件开发的影响
尽管电机选型主要是硬件和机电工程师的职责,但软件开发人员(特别是从事运动控制、嵌入式或上位机控制软件开发)必须了解其差异,因为这直接影响控制算法的设计与系统集成:
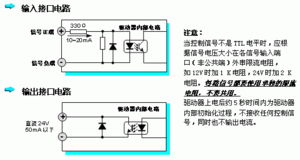
- 控制接口与协议:伺服驱动器通常支持更复杂的通信协议(如EtherCAT、CANopen、Modbus等),并提供丰富的参数设置和状态反馈。步进电机驱动器接口相对简单,多为“脉冲+方向”模式。软件架构需据此进行设计。
- 控制逻辑复杂性:对于步进系统,软件主要负责发送脉冲序列,但需考虑加减速曲线(S曲线或梯形曲线)以降低失步和振动风险。对于伺服系统,软件除了发送运动指令,还需处理编码器反馈、进行闭环调节(PID参数整定)、处理报警和状态机,复杂度更高。
- 错误处理与诊断:伺服系统提供详尽的故障反馈(过载、过流、编码器错误等),软件可以据此实现高级诊断和预警。步进系统的错误处理则更为被动,通常需要通过外部传感器(如限位开关、光电传感器)来检测是否失步或到位。
- 系统建模与仿真:在设计高精度伺服控制系统时,软件前期可能需要进行系统建模和仿真,以预测性能并优化参数。
结论
在非汽车领域的电气控制系统设计中,步进电机以其低成本、简单控制的特点,适用于对性能要求不高的低速、确定性负载场景;而伺服电机凭借其闭环控制、高精度、高响应和强过载能力,是高性能、高动态应用的不二之选。
软件开发团队在项目初期就应介入电机选型讨论,理解所选电机的工作特性和接口要求,从而设计出匹配、高效、可靠的控制软件,实现软硬件的协同优化,最终构建出性能卓越的电气控制系统。
如若转载,请注明出处:http://www.yudiping.com/product/54.html
更新时间:2026-06-19 04:10:59