德国TRINAMIC智能电机控制系统软件开发 驱动未来的精密与效率
德国TRINAMIC以其卓越的运动控制技术闻名于世,其智能电机控制系统(如TMC系列芯片与模块)为步进电机、无刷直流电机等提供了高性能、低噪音、高效率的解决方案。针对此类系统的软件开发,是充分发挥其硬件潜力的关键环节,涉及从底层寄存器配置到高级应用集成的全链路技术实践。
1. 核心软件开发框架与工具
TRINAMIC通常提供全面的软件支持,包括:
- TMC-API(应用程序接口):统一的C语言函数库,抽象底层硬件操作,简化开发流程。它提供对电机参数(如电流、微步分辨率、堵转检测)的便捷设置。
- 开发环境与IDE:支持Keil、IAR、以及基于Eclipse的生态系统,兼容主流的ARM Cortex-M内核微控制器。
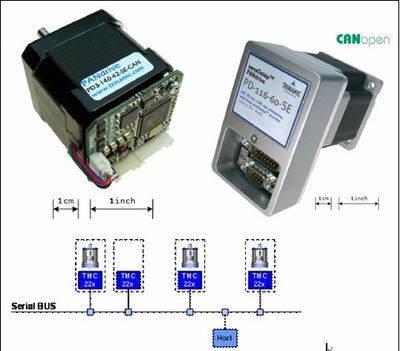
- TMCL-IDE:对于使用TMCL(TRINAMIC Motion Control Language)协议的模块(如TMCM系列),该图形化工具允许通过CAN、UART等接口进行电机配置、测试和脚本编程,极大降低了初期评估和原型开发的难度。
- 示例代码与评估套件:针对不同芯片(如TMC2130, TMC5160等)和评估板,提供丰富的示例项目,涵盖基础驱动、StallGuard(无传感器负载检测)、CoolStep(电流自适应节能)等高级功能的实现。
2. 软件开发的关键技术要点
在实际开发中,工程师需重点关注以下几个方面:
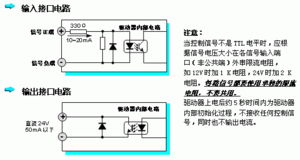
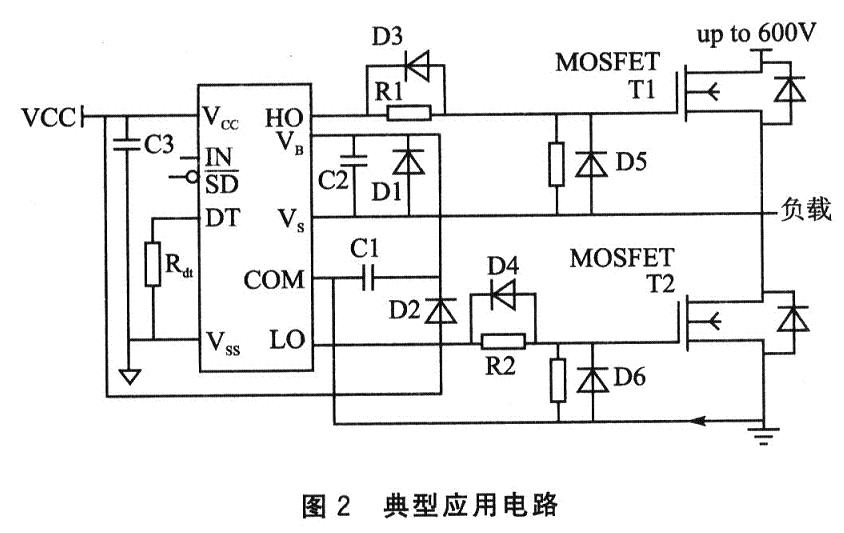
- 通信接口驱动:TRINAMIC芯片通常支持SPI、UART、PWM/DIR等接口。软件开发的首要任务是实现稳定、高效的底层通信驱动,确保微控制器能够正确读写芯片内部的配置寄存器。
- 参数配置与优化:这是软件的核心。通过API或直接寄存器操作,精细调节:
- 电流与力矩控制:根据电机和负载设置峰值与保持电流,实现最佳力矩与发热平衡。
- 微步插值:利用芯片内置的微步插值器(如TMC5160的StealthChop2),实现超高细分,获得极其平滑的运动和静音运行。
- 传感器反馈集成:对于闭环控制,软件需处理编码器(如通过SPI读取)或霍尔传感器的数据,与芯片的StallGuard或编码器接口功能结合,实现精准的位置跟踪和失步防护。
- 高级功能算法实现:
- CoolStep:根据负载动态调节电机电流的算法,软件需监控负载情况并自动调整参数,以最大化能效。
- SpreadCycle与StealthChop:针对高动态响应或超静音需求,在软件中动态切换或配置这两种核心的斩波模式。
- 运动曲线生成:虽然芯片内部常集成梯形/SPI曲线发生器,但复杂运动仍需上位机或微控制器计算并下发目标位置/速度指令。
3. 集成与系统级开发
将TRINAMIC控制系统集成到更大的自动化或机器人系统中时,软件开发需考虑:
- 实时操作系统(RTOS)适配:在FreeRTOS、Zephyr等RTOS环境下,将电机控制任务、通信任务合理调度,确保实时性。
- 总线协议支持:对于工业应用,可能需要开发基于CANopen、EtherCAT(如通过ESC芯片)或Modbus的从站协议栈,使TRINAMIC驱动器成为网络中的一个智能节点。
- 用户界面与诊断:开发上位机配置工具或HMI界面,用于参数设置、状态监控(如温度、位置、错误标志)和运动调试。
- 安全功能:软件层面实现硬制动、软限位、错误状态监测与恢复机制,满足功能安全要求。
4. 开发挑战与最佳实践
- 挑战:寄存器配置复杂、高级功能交互影响需深入理解、不同芯片型号间的API差异、高频噪声环境下的通信可靠性。
- 最佳实践:
- 从官方评估板和示例代码开始,逐步深入。
- 充分利用TMCL-IDE进行快速原型验证和参数调优。
- 详细研读数据手册和应用笔记,特别是关于时序和电磁兼容性的建议。
- 建立模块化的软件架构,隔离硬件驱动、控制算法和应用逻辑,便于移植和维护。
- 实施严格的测试,包括单点测试(如通信、电流环)和系统集成测试(如长时间运行、负载突变)。
###
德国TRINAMIC智能电机控制系统的软件开发,是一项结合了精密硬件特性理解与扎实嵌入式软件工程能力的任务。通过充分利用其强大的软件生态和深入挖掘芯片的高级功能,开发者能够构建出响应迅速、运行平稳、能效出色的运动控制解决方案,从而驱动从3D打印机、实验室自动化到工业机器人等众多领域的创新应用迈向更高水平。
如若转载,请注明出处:http://www.yudiping.com/product/62.html
更新时间:2026-06-19 11:40:06