电机驱动控制系统设计 从核心原理到研发实践
电机及其控制系统是现代工业自动化、新能源汽车、智能家电及机器人等领域的核心动力来源与执行单元。一个高效、可靠、智能的电机驱动控制系统,其设计与研发融合了电力电子、控制理论、微处理器技术和电机学等多学科知识。本文将系统阐述其设计要点与研发流程。
一、系统架构与核心组成
一个典型的电机驱动控制系统主要由三大部分构成:功率变换模块、控制模块以及作为被控对象的电机本体。
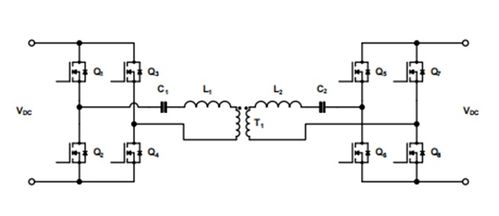
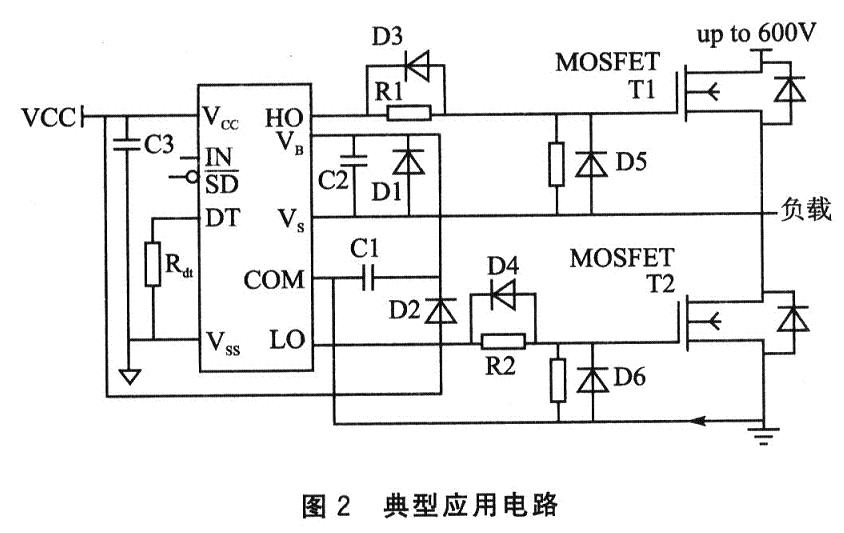
- 功率变换模块:通常采用基于IGBT或MOSFET的逆变器,负责将直流电(或经整流后的交流电)转换为幅值、频率可调的多相交流电,为电机提供驱动能量。其设计关键包括功率器件选型、散热设计、驱动电路保护以及电磁兼容性(EMC)优化。
- 控制模块:作为系统的“大脑”,通常以微控制器(MCU)、数字信号处理器(DSP)或专用驱动芯片为核心。它负责执行控制算法,实时处理来自电流/电压传感器、位置/速度编码器的反馈信号,生成精确的脉宽调制(PWM)信号来控制逆变器。
- 电机本体:常见的包括永磁同步电机(PMSM)、无刷直流电机(BLDC)、感应电机(IM)等。电机的参数(如定转子电感、电阻、永磁体磁链等)是控制系统建模与算法设计的基础。
二、核心控制策略与算法研发
控制算法的目标是实现电机转矩、转速或位置的精确、快速、平稳控制。研发重点包括:
- 基础控制环:通常采用经典的级联控制结构,内环为电流(转矩)环,外环为速度或位置环。电流环要求高带宽以实现快速转矩响应,常用基于电机模型的解耦控制(如对于PMSM的id=0控制或最大转矩电流比控制)。
- 先进控制技术:为提升动态性能与鲁棒性,研发中常引入更复杂的算法,如:
- 矢量控制(FOC):通过坐标变换实现交流电机类似直流电机的解耦控制,是高性能驱动的标准方案。
- 直接转矩控制(DTC):直接控制电机的磁链和转矩,动态响应快,但对参数变化较敏感。
- 智能控制与观测器:应用滑模控制、模糊自适应控制以增强鲁棒性;采用模型参考自适应系统(MRAS)、滑模观测器(SMO)或扩展卡尔曼滤波器(EKF)实现无传感器控制,省去物理编码器。
三、系统研发流程与关键技术考量
一个完整的电机驱动控制系统研发遵循“需求分析-设计-实现-测试-优化”的迭代过程。
- 需求定义与方案选型:明确应用场景对转矩、转速、精度、效率、尺寸、成本及可靠性的要求,据此选择电机类型、控制器硬件平台和基础控制架构。
- 建模与仿真:利用MATLAB/Simulink、PLECS等工具建立电机、逆变器及控制系统的精确数学模型,进行离线仿真验证算法可行性,并进行参数整定,大幅缩短研发周期。
- 硬件设计与实现:完成原理图与PCB设计,重点考虑:
- 采样精度:高精度、低延迟的电流采样电路是关键。
- 隔离与保护:强弱电之间的信号隔离(如使用光耦或隔离运放)、过流、过压、过热保护电路必不可少。
- 软件实现:将控制算法代码化(通常使用C语言),在MCU上实现实时中断服务程序,优化计算效率与代码结构。
- 系统调试与性能测试:借助示波器、功率分析仪、动态测功机等设备,在实际负载下测试系统的稳态精度、动态响应、效率图谱及温升,并根据测试结果迭代优化控制参数与硬件设计。
四、发展趋势与挑战
电机驱动控制系统的研发正向更高性能、更高集成度、更智能化方向发展。具体体现在:
- 集成化与模块化:高度集成的智能功率模块(IPM)及“控制器+驱动+保护”三合一的方案成为主流,有助于减小体积、提高可靠性。
- 智能化与网络化:集成故障诊断、预测性维护功能;支持CAN、EtherCAT等工业总线,便于融入更大的自动化系统。
- 追求极致效率:宽禁带半导体(如SiC、GaN)器件的应用可显著降低开关损耗,提升系统效率与功率密度。
电机驱动控制系统的设计是一项复杂的系统工程,其研发水平直接决定了终端设备的性能边界。成功的研发需要深入理解电机电磁与热力学特性、掌握现代控制理论与数字实现技术,并具备扎实的电力电子硬件工程能力。随着新材料、新器件与新算法的不断涌现,这一领域将持续推动着各行业动力系统的革新与进步。
如若转载,请注明出处:http://www.yudiping.com/product/63.html
更新时间:2026-06-19 02:53:45